InsidetheKineticEngine.
A transparent look at our hybrid AI framework, multi-sensory data fusion, and the Open Foundry validation pipeline underpinning our predictive models.
01. Data Acquisition
Multi-Sensory Fusion Engine
We don't rely on GPR alone. Our systems sync hardware telemetry, visual data, and structural sensors into a single, cohesive spatial matrix, eliminating the blind spots of legacy inspection methods.
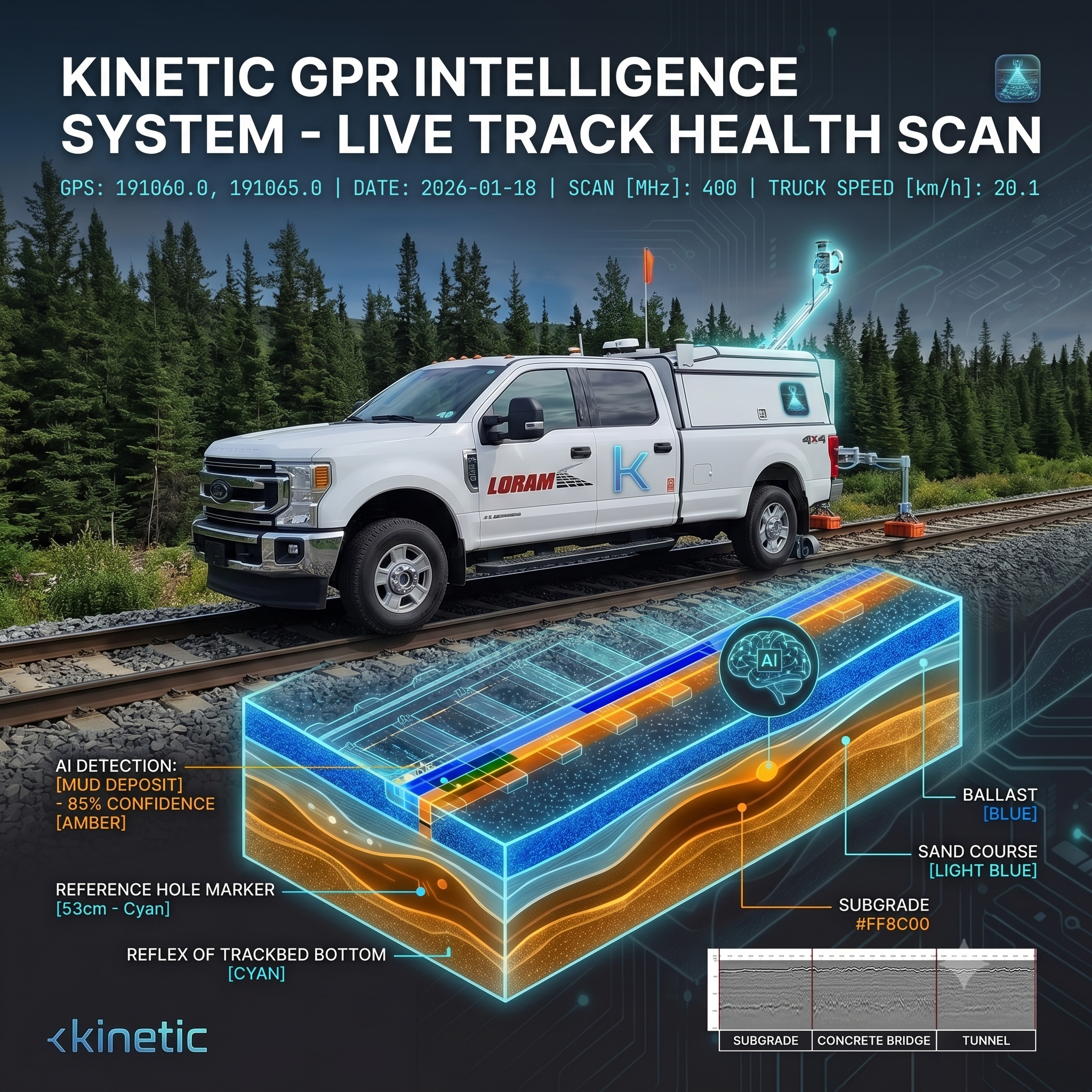
GPR Array Live
- Depth Resolution Verified [x]
- Layer Mapping Confirmed [x]
- Frequency 400 MHz Center
Multi-channel GPR profiling to identify ballast and subgrade anomalies — the primary sensor in our data acquisition stack.
LiDAR & Point Cloud
- Track Geometry Planned [→]
- Surface Texture Planned [→]
- Gauge Measure Targeted Integration
Precision surface mapping ensuring top-of-rail geometric data accurately correlates with subsurface GPR anomalies.
High-Speed Vision
- Fastener Integrity Planned [→]
- Tie Quality Planned [→]
- Sync Rate Target: High-Speed
Visual feature extraction providing critical surface context (e.g., pumping mud) to validate and ground-truth GPR fouling indices.
02. Data Integrity
The Open Foundry Pipeline
An AI is only as good as its ground truth. We don't guess based on pixels; we rigorously correlate our predictive models against 12,000+ physical core samples pulled directly from the rail bed.
Dataset Validation Checklist
03. Model Intelligence
AI Model Architecture
Our research models use a dual-architecture hybrid approach — combining spatial image analysis (CRNN) with structured numerical telemetry (XGBoost).
CRNN Architecture
Convolutional Recurrent Neural Networks designed to parse the spatial hyperbola patterns within raw B-scan GPR radargrams.
XGBoost Framework
Extreme Gradient Boosting utilized to analyze structured, numerical A-scan data properties (amplitude, phase, frequency attenuation).
Join the Waitlist
Early access to the Kinetic GPR Pro platform is currently restricted. Partner with us to deploy the world's most advanced subsurface intelligence engine.